
COMPUTATIONAL PERFORMANCE OF HOLE FILLING MORPHOLOGICAL ALGORITHMS FOR BINARY IMAGES
Gonzalo Urcid 1![]()
![]() ,
José-Angel Nieves-Vázquez 2
,
José-Angel Nieves-Vázquez 2![]()
![]() ,
Rocío Morales-Salgado 3
,
Rocío Morales-Salgado 3![]()
1 Ph.D.,
Optics Department, INAOE, Tonantzintla 72840, Mexico
2 Ph.D.,
Engineering Division, ITSSAT, Matacapan 95804, Mexico
3 Ph.D.,
Information and Data Science Department, UPAEP, Puebla 72410, Mexico
|
|
|
ABSTRACT |
|
|
The presence of holes, cracks or scratches in one or more object regions in a binary image usually results from quantizing or thresholding a gray scale image. However, for further processing or quantitative binary image analysis, those artifacts must be removed by filling the corresponding object regions. In this paper, a computational performance analysis is realized for the class of hole filling algorithms based on mathematical morphology. Two fundamental techniques, supervised and unsupervised, are described in detail based on marker images that may be composed of pixel subsets chosen within an object region artifact, formed by external near by points to object regions, or from selected background pixel subsets. A mathematical description spanning the different variants is given on how this kind of algorithms converge to the desired result. In addition, illustrative examples using representative binary images are provided to test and compare the computational performance in terms of the number of iterations corresponding to each morphological hole filling algorithm for binary images. |
|||
|
Received 12 December 2023 Accepted 14 January 2024 Published 30 January 2024 Corresponding Author Gonzalo
Urcid, gurcid@inaoep.mx DOI 10.29121/IJOEST.v8.i1.2024.565 Funding: This research
received no specific grant from any funding agency in the public, commercial,
or not-for-profit sectors. Copyright: © 2024 The
Author(s). This work is licensed under a Creative Commons
Attribution 4.0 International License. With the
license CC-BY, authors retain the copyright, allowing anyone to download,
reuse, re-print, modify, distribute, and/or copy their contribution. The work
must be properly attributed to its author.
|
|||
|
Keywords: Binary Image
Processing, Hole Filling Algorithms Performance, Mathematical Morphology |
|||
1. INTRODUCTION
The subject of morphological binary image processing Serra (1986), Maragos (1987), Haralick et al. (1987), Dougherty (1992) is a branch of the more general subject of digital image processing and analysis. Binary image processing deals with black and white digital images whose values are coded with 0’s and 1’s, where the zero ‘0’ and one ‘1’ values are commonly interpreted, respectively, as background and foreground pixels. The foreground pixels may form one or more white shapes or regions in the image that usually correspond to objects of interest surrounded by a black background Pitas (2000), Gonzalez & Woods (2018). Since binary images are a special case of gray scale images, it turns out that for “looking” or “displaying” a binary image coded with 0’s and 1’s, it is mapped to the gray scale dynamic range of non-negative integer values belonging to [0,255] assuming that the grayscale image is coded with 8 bits per pixel. Hence, for displaying purposes, the minimum value ‘0’ still represents black and the maximum value ‘255’ corresponds to white. Image processing tasks such as object segmentation and object recognition may produce a binary image that is obtained from thresholding or quantizing a grayscale image Pitas (2000), Najman & Talbot (2010), Gonzalez & Woods (2018), Gonzalez et al. (2020). The output binary image then requires some kind of post-processing to prepare it for further analysis. A typical situation is the presence of holes, cracks, or scratches in several regions of a binary image that need to be removed by filling them. For example, possible reasons for the presence of holes in a binary image is due to occluding objects, low reflectance subregions, or missing scanned portions ocurring in grayscale images. We remark that using the corresponding digital topology associated with an underlying digital grid such as the square grid, holes, cracks, and scratches can be considered as the same type of image artifact. Henceforth, we will use the word “hole” to represent any of the previously mentioned items. From a geometrical point of view, based on set theory, mathematical morphology has devised simple and effective hole filling algorithms to tackle the aforementioned problem as can be seen in Vincent (1992), Vincent (1993), Géraud et al. (2010) . In this research paper, we present a computational performance analysis of the fundamental region filling procedures based on mathematical set morphology.
Recent contributions with respect to the
basic hole filling morphological algorithms are described in Hasan & Mishra (2012), Valdiviezo et al. (2017). The work
presented in Hasan & Mishra (2012) suggests the use of a
different initial marker image for increasing the number of seed points used in
the dilation operation as well as the dynamic use of two structuring elements, the
“diamond” and “square” structuring elements of size ![]() ,
combined with thresholding for corrections of local 4-connectivity and
1-pixel-thin border object processing. On the other hand in Valdiviezo et al. (2017), a supervised hole
filling algorithm based on morphological conditional dilation is based on
chosing a single background pixel as the marker image and has the advantage of
being very simple. However, this last scheme although interactive in nature,
happens to be a particular case of the more general mechanism explained in
Subsection 3.2 for the unsupervised algorithm. Also, alternative
advances that realize improvements over the hole filling morphological
algorithms are described in Fanfeng & Wei (2010), He et al. (2019). However, we do not
delve into these last works since their computer implementation requires
additional non-morphological
techniques that would require other performance measures besides the number of
iterations that we have selected for our computational tests.
,
combined with thresholding for corrections of local 4-connectivity and
1-pixel-thin border object processing. On the other hand in Valdiviezo et al. (2017), a supervised hole
filling algorithm based on morphological conditional dilation is based on
chosing a single background pixel as the marker image and has the advantage of
being very simple. However, this last scheme although interactive in nature,
happens to be a particular case of the more general mechanism explained in
Subsection 3.2 for the unsupervised algorithm. Also, alternative
advances that realize improvements over the hole filling morphological
algorithms are described in Fanfeng & Wei (2010), He et al. (2019). However, we do not
delve into these last works since their computer implementation requires
additional non-morphological
techniques that would require other performance measures besides the number of
iterations that we have selected for our computational tests.
Our paper is organized as follows: in Section 2 we will give only the necessary mathematical morphology operations involved in hole filling algorithms. However, for the interested reader, in depth treatments of the basic morphological operations including additional ones derived using dilation and erosion, their algorithmic implementation as well as their applications to other tasks in digital image processing and analysis can be found in Rivest et al. (1993), Van Droogenbroeck (1994), Bloch et al. (2007), Beucher & Beucher (2012), Gonzalez & Woods (2018) and Gonzalez et al. (2020). Section 3 gives in detail the theoretical description of the fundamental mathematical morphology hole filling techniques emphasizing the central role of the marker image and henceforth, classifying the corresponding computational procedures as supervised or unsupervised. In Section 4, we present our tests on various representative binary digital images using as a measure of computational performance, the number of iterations needed in each algorithm as applied to each binary image to produce the desired result. We end our paper with Section 5 to expose the conclusions of this research work as well as some pertinent comments on future developments.
2. BACKGROUND ON MATHEMATICAL MORPHOLOGY
Mathematical morphology as applied to digital image
processing is a mathematical theory that is concerned with analysing and
extracting form or shape information from objects contained
in a given image. The basic scenario does occur in binary images where the
notions of foreground objects and background are in general clearly
distinguished in the context of specific real-world applications. Two encodings
are possible in binary image processing, i. e., white foreground (WF) objects immersed in a black background (BB), denoted for short as WF-BB, or black foreground (BF) objects embedded
in a white background (WB)
abbreviated as BF-WB. Algebraically speaking, both encodings, WF-BB and BF-WB,
are dual to each other using binary complementation. Here we will use the first
encoding. Note that the WF-BB coding is a particular case of grayscale 8-bit
encoding whose dynamic range of 256 values is reduced from the non-negative
integer interval, ![]() ,
to the two-value set
,
to the two-value set ![]() .
On the other hand, the BF-WB encoding is generally employed in silhouette,
artistic binary image processing or in theoretical descriptions based on graph
theory. In this paper, only square images of size
.
On the other hand, the BF-WB encoding is generally employed in silhouette,
artistic binary image processing or in theoretical descriptions based on graph
theory. In this paper, only square images of size ![]() picture elements are used to simplify symbolic
expressions in mathematical arguments and also since the extension to
rectangular images is rather trivial.
picture elements are used to simplify symbolic
expressions in mathematical arguments and also since the extension to
rectangular images is rather trivial.
2.1. Operations
on Sets, Dilation and Erosion
We assume the reader is familiar with set
relations such as inclusion and equality as well as the set operations of
union, intersection, difference, and complementation. Some geometrical
operations on sets follow. If ![]() ,
with origin
,
with origin ![]() ,
represents the two-dimensional digital space, let
,
represents the two-dimensional digital space, let ![]() ,
then the complement A is defined as
,
then the complement A is defined as ![]() ,
and the symmetrical, origin reflected or transpose of A is
considered to be the set
,
and the symmetrical, origin reflected or transpose of A is
considered to be the set ![]() .
Also, if
.
Also, if ![]() ,
the translation of A by x,
or translate
,
the translation of A by x,
or translate ![]() is the subset of S specified by
is the subset of S specified by ![]() .
In order to extract shape information from objects contained in a given image,
the basic mechanism from the stand point of mathematical morphology, is to use
a geometrically well-defined tiny shape as a probe that scans and interacts
pixelwise with foreground objects and background. The elementary morphological
operations, known as dilation and erosion, work with these tiny shapes
formally called structuring elements,
respectively to grow or shrink image objects. Thus, given a binary image A and a structuring element B, both considered as subsets of S, dilation
and erosion of image set A by structuring element B are defined, respectively, by the left
and right expressions in (1),
.
In order to extract shape information from objects contained in a given image,
the basic mechanism from the stand point of mathematical morphology, is to use
a geometrically well-defined tiny shape as a probe that scans and interacts
pixelwise with foreground objects and background. The elementary morphological
operations, known as dilation and erosion, work with these tiny shapes
formally called structuring elements,
respectively to grow or shrink image objects. Thus, given a binary image A and a structuring element B, both considered as subsets of S, dilation
and erosion of image set A by structuring element B are defined, respectively, by the left
and right expressions in (1),
![]()
where x denotes
locations or points in digital space S and ![]() and
and ![]() denotes the translate of the symmetric structuring
element, respectively, itself, to location
denotes the translate of the symmetric structuring
element, respectively, itself, to location ![]() .
Note that dilation of A by B, denoted as
.
Note that dilation of A by B, denoted as ![]() ,
is a new set formed by all points
,
is a new set formed by all points ![]() such that
such that ![]() displaced at each x, overlaps or hits at least some portion of A. Analogously, erosion of A
by B, in symbolic terms
displaced at each x, overlaps or hits at least some portion of A. Analogously, erosion of A
by B, in symbolic terms ![]() ,
refers to a new set consisting of all points
,
refers to a new set consisting of all points ![]() such that B
translated by x fits completely
within A. The second equality shown
in the left and right expressions in (1) are the equivalent set-theoretical
operations corresponding to Minkowski addition and Hadwiger substraction, which
make clear, the upsizing or downsizing nature of A by B through a
generalized union or intersection of translates. We point out that dilation and
erosion are dual by complementation
in the sense that dilating set A with
structuring element B is equivalent
to perform and erosion of its complement
such that B
translated by x fits completely
within A. The second equality shown
in the left and right expressions in (1) are the equivalent set-theoretical
operations corresponding to Minkowski addition and Hadwiger substraction, which
make clear, the upsizing or downsizing nature of A by B through a
generalized union or intersection of translates. We point out that dilation and
erosion are dual by complementation
in the sense that dilating set A with
structuring element B is equivalent
to perform and erosion of its complement ![]() with
the symmetrical of
with
the symmetrical of ![]() as established in (2),
as established in (2),
![]()
Qualitatively, dilation enlarges an
object, changes its convex corners, and reduces its surrounding background.
Similarly, erosion reduces an object, changes its concave corners, and enlarges
its neighbouring background. In relation to the morphological region filling
algorithms exposed in Section 3, we will use only the dilation operation
together with set complementation. Particularly, if B is a structuring element the repeated
dilation of B with itself, i. e.,
![]() is written as 2B. In addition, if A is a
single element set, i. e.,
is written as 2B. In addition, if A is a
single element set, i. e., ![]() ,
then from (1) it follows readily that,
,
then from (1) it follows readily that,
![]()
meaning that dilation of a single
(isolated) point x by B is equivalent to a geometrical
translation of B to x which is coincident with B’s origin. Also, erosion of a single
point x by B has the effect of removing the point since B displaced to x is not a
subset of {x}. A structuring element will be abbreviated as
SE. More specifically, use is made of 3×3
SE’s having 4-connectivity (straight
cross ‘+’ or diagonal cross ‘×’),
and 8-connectivity (square block ‘■’).
2.2. Image
Border, Holes and Local Knowledge
For a binary image ![]() of size
of size ![]() pixels, the border or frame of A, denoted by
pixels, the border or frame of A, denoted by ![]() ,
is defined by the set of pixels given by the union of the top (first) and bottom
(last) rows of pixels together with
the left (first) and right (last) columns of pixels. Thus,
,
is defined by the set of pixels given by the union of the top (first) and bottom
(last) rows of pixels together with
the left (first) and right (last) columns of pixels. Thus, ![]() ,
where
,
where ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
and
,
and ![]() for all i
and j. A hole is defined as a background region in which any pixel is
surrounded by a connected path of foreground pixels. An alternative definition
of a hole is a background region that is bounded by a foreground object.
Equivalently, no connected path of background pixels exists between any pixel
in a hole and a background pixel of
for all i
and j. A hole is defined as a background region in which any pixel is
surrounded by a connected path of foreground pixels. An alternative definition
of a hole is a background region that is bounded by a foreground object.
Equivalently, no connected path of background pixels exists between any pixel
in a hole and a background pixel of ![]() .
It should be clear that the border of an image not only delimits its size but
also its contents. Hence, a physical sensor of finite dimensions that acquires
or captures an image from a real scene
will provide us with partial or local knowledge relative to objects or
foreground regions contained in the original scene. In the case of objects with
holes,
.
It should be clear that the border of an image not only delimits its size but
also its contents. Hence, a physical sensor of finite dimensions that acquires
or captures an image from a real scene
will provide us with partial or local knowledge relative to objects or
foreground regions contained in the original scene. In the case of objects with
holes, ![]() may cut or truncate portions of their
corresponding regions leaving them “unfinished” or “incomplete” beyond the
image frame. Therefore, in a strict sense, truncated holes, cracks or scratches
cannot be considered as such due to incomplete knowledge outside the image
border. However, the ocurrences just mentioned may be filled or not depending
of contextual image content and its interpretation for further processing.
may cut or truncate portions of their
corresponding regions leaving them “unfinished” or “incomplete” beyond the
image frame. Therefore, in a strict sense, truncated holes, cracks or scratches
cannot be considered as such due to incomplete knowledge outside the image
border. However, the ocurrences just mentioned may be filled or not depending
of contextual image content and its interpretation for further processing.
3. MORPHOLOGICAL REGION FILLING ALGORITHMS
The hole filling algorithms based on mathematical morphology can be categorized as supervised or unsupervised, and each one of them is founded on specific morphological set operations between the image itself and an auxiliary image known as the marker image, which in turn is derived from the given input image. The algorithms have been devised to be iterative in nature and therefore convergence to the desired result, i. e., the filled image is guaranteed to be obtained in a finite number of steps.
3.1. Supervised Filling Algorithm
A mathematical morphology hole filling algorithm is said
to be supervised if the marker image
is derived from the input image by selecting interactively an adequate subset
of pixels. The chosen pixels may belong to image oject regions, to the image
background or a mixture of both. Assuming that m holes ![]() for
for ![]() exist in one or more objects as foreground
regions in a given binary image A of
size
exist in one or more objects as foreground
regions in a given binary image A of
size ![]() ,
the common choice, as exposed in preliminary treatments on mathematical
morphology of sets and its applications to binary images Gonzalez & Woods (2018), Gonzalez et al. (2020) consists in taking a
single point or pixel
,
the common choice, as exposed in preliminary treatments on mathematical
morphology of sets and its applications to binary images Gonzalez & Woods (2018), Gonzalez et al. (2020) consists in taking a
single point or pixel ![]() belonging to each hole
belonging to each hole ![]() .
Thus, the marker image M or set
of markers is defined as the set
.
Thus, the marker image M or set
of markers is defined as the set ![]() ,
where
,
where ![]() is not a proper subset of A and
is not a proper subset of A and ![]() .
The basic morphological hole filling algorithm consists of an iterative scheme
based on conditional dilation as
specified in the following equation:
.
The basic morphological hole filling algorithm consists of an iterative scheme
based on conditional dilation as
specified in the following equation:
![]()
where, ![]() is a symmetric structuring element
corresponding to
is a symmetric structuring element
corresponding to ![]() elementary
neighborhood with 4 (straight or diagonal cross), 6 (hexagon) or 8 (square)
connectivity, and
elementary
neighborhood with 4 (straight or diagonal cross), 6 (hexagon) or 8 (square)
connectivity, and ![]() is the complement of A. Computation of
is the complement of A. Computation of ![]() is repeated until
is repeated until ![]() and the final iteration stops at
and the final iteration stops at ![]() . In the last step, the union set
. In the last step, the union set ![]() contains the original object regions with
their holes, cracks, or scratches filled. Note that, in (4), the intersection
of
contains the original object regions with
their holes, cracks, or scratches filled. Note that, in (4), the intersection
of ![]() at each iteration with
at each iteration with ![]() limits the expanding effect of performing
successive dilations. To cover every aspect, we explain in more detail how the
basic algorithm works. Specifically, we can write the marker set as
limits the expanding effect of performing
successive dilations. To cover every aspect, we explain in more detail how the
basic algorithm works. Specifically, we can write the marker set as ![]() ,
where each point
,
where each point ![]() and
and ![]() is a subset corresponding to a hole within an
object region that properly may have more than one hole and which we write as
is a subset corresponding to a hole within an
object region that properly may have more than one hole and which we write as ![]() .
We also assume that the structuring element contains the origin, thus
.
We also assume that the structuring element contains the origin, thus ![]() .
Unfolding the iterative conditional dilation for
.
Unfolding the iterative conditional dilation for ![]() we have that
we have that

where ![]() is the structuring element translated to point
is the structuring element translated to point
![]() after applying the first expression in (3),
and
after applying the first expression in (3),
and ![]() for any i.
Similarly, for
for any i.
Similarly, for ![]() ,
we obtain,
,
we obtain,

Note that, ![]() can be written as
can be written as ![]() since dilation at each iteration is performed
on the previously grown set
since dilation at each iteration is performed
on the previously grown set ![]() . Thus, the result of the l-th iteration is given by
. Thus, the result of the l-th iteration is given by ![]() , where
, where ![]() .
At this stage, several points in
.
At this stage, several points in ![]() have been expanded to their corresponding hole
sizes and the remaining unfilled holes still require further iterations until
the growing scheme stops after masking once more with
have been expanded to their corresponding hole
sizes and the remaining unfilled holes still require further iterations until
the growing scheme stops after masking once more with ![]() .
Therefore, for
.
Therefore, for ![]() ,
it happens that
,
it happens that ![]() which in turn implies that
which in turn implies that ![]() ,
and the resulting set,
,
and the resulting set, ![]() contains the required flooded holes. Finally,
set
contains the required flooded holes. Finally,
set ![]() gives the desired result by gluing all the
filled holes with the original image. Consequently, all multiconnected
foreground regions or equivalently objects with one or more holes are changed
to simple connected regions, i. e., objects without holes, cracks or scratches.
The supervised morphological filling algorithm will be abbreviated as SMFA.
gives the desired result by gluing all the
filled holes with the original image. Consequently, all multiconnected
foreground regions or equivalently objects with one or more holes are changed
to simple connected regions, i. e., objects without holes, cracks or scratches.
The supervised morphological filling algorithm will be abbreviated as SMFA.
3.2. Unsupervised Filling Algorithm
A mathematical morphology hole filling algorithm is said to be unsupervised if the marker image is derived from the input image by means of a mathematical function or by an automatic procedure that defines an adequate proper subset of pixels (cf., e.g., Hasan & Mishra (2012) and Gonzalez & Woods (2018)). Again, selected image points may be background, foreground or a combination of both types of pixels. In the present context used is made of what is known as morphological reconstruction and the terminology is changed to convey its generality upon application of more advanced morphological mathematical operations such as opening or closing which fall outside the scope of this work. Specifically, morphological conditional dilation turns to be morphological geodesical dilation, the input or source image is consider as a mask to control geodesical dilation growth or reconstruction, and the role of the marker image is the same as previously explained, except that it is defined by a mathematical function as already mentioned above. For the case at hand, the marker image M corresponding to the mask image usually denoted by G is given by,
![]()
Interpretation of (5) in terms of image content is that, ![]() ,
a set difference equal to the void set gives us a full black background image
of which we change the image border, i.e.,
,
a set difference equal to the void set gives us a full black background image
of which we change the image border, i.e., ![]() with white pixels all around except where
foreground objects touch it and become black pixels. If
with white pixels all around except where
foreground objects touch it and become black pixels. If ![]() denote the integer spatial coordinates of
image G (the mask or input image),
where
denote the integer spatial coordinates of
image G (the mask or input image),
where ![]() ,
then the matrix expression associated with (5) is the following:
,
then the matrix expression associated with (5) is the following:
![]()
Worth to remark is the fact that the marker image M as established in (6) is a set of
pixels with a special structure that is not a subset of G. In particular, if ![]() is a background pixel then
is a background pixel then ![]() ,
meaning that the selected image border pixel is turned “on”, i. e., becomes a
marker. In case
,
meaning that the selected image border pixel is turned “on”, i. e., becomes a
marker. In case ![]() is a foreground pixel then
is a foreground pixel then ![]() ,
hence the corresponding image border pixel is turned “off” or equivalently is
not consider a marker point. Thus, M
contains only background pixels as
marker points. As mentioned earlier, in morphological processing several image
manipulations are derived from a parametric operation known as morphological recontruction that
considers two images, the marker image M
and the mask image G together with a
symmetric structuring element B which
is a
,
hence the corresponding image border pixel is turned “off” or equivalently is
not consider a marker point. Thus, M
contains only background pixels as
marker points. As mentioned earlier, in morphological processing several image
manipulations are derived from a parametric operation known as morphological recontruction that
considers two images, the marker image M
and the mask image G together with a
symmetric structuring element B which
is a ![]() elementary neighborhood with 4, 6 or 8
connectivity. Notice that in general G
is not necessarily equal to a given input image A. Furthermore, in the case of filling one or more holes using (6)
it turns out that
elementary neighborhood with 4, 6 or 8
connectivity. Notice that in general G
is not necessarily equal to a given input image A. Furthermore, in the case of filling one or more holes using (6)
it turns out that ![]() .
Particularly, the morphological geodesic
dilation of size n is defined
recursively as,
.
Particularly, the morphological geodesic
dilation of size n is defined
recursively as,
![]()
expression interpreted as the morphological geodesic dilation of size 1. Recalling the way M is defined, the unsupervised hole filling algorithm using morphological geodesic dilation is based on the following iterative procedure,
![]()
until stability is accomplished, i. e., when ![]() and
and ![]() is the last iteration. In the final step, the
output or final image
is the last iteration. In the final step, the
output or final image ![]() with all holes filled is determined by
computing,
with all holes filled is determined by
computing,
![]()
Again, for the sake of completeness, we
present how the algorithm given by (8) and (9) works. As before, we can write
the marker set as ![]() ,
where each point
,
where each point ![]() ,
,
![]() ,
and
,
and ![]() is the subset corresponding to the image
border. Note that M does not contain
any point marking a hole within an object region. Recalling that the
structuring element contains the origin, i. e.,
is the subset corresponding to the image
border. Note that M does not contain
any point marking a hole within an object region. Recalling that the
structuring element contains the origin, i. e., ![]() and that the mask
and that the mask ![]() ,
the morphological geodesic dilation for
,
the morphological geodesic dilation for ![]() is given by
is given by

where ![]() is the structuring element translated to point
is the structuring element translated to point
![]() after applying the first expression in (3),
and
after applying the first expression in (3),
and ![]() for any i.
Similarly, the morphological geodesic dilation for
for any i.
Similarly, the morphological geodesic dilation for ![]() ,
results in,
,
results in,


In similar fashion, the result of the l-th iteration is given by ![]() , where
, where ![]() .
At this stage, all points in M have
been expanded within the mask G
covering almost all space outside the exterior edges of object regions with or
without holes, no matter their number or size. Further iterations fills up the
remaining external space and dilation stops after masking once more with G and obtaining a result equal to the
previous one. Therefore, for
.
At this stage, all points in M have
been expanded within the mask G
covering almost all space outside the exterior edges of object regions with or
without holes, no matter their number or size. Further iterations fills up the
remaining external space and dilation stops after masking once more with G and obtaining a result equal to the
previous one. Therefore, for ![]() ,
it happens that
,
it happens that ![]() which in turn implies that
which in turn implies that ![]() ,
and the resulting set,
,
and the resulting set, ![]() contains the flooded space that surrounds the
exterior edges of all object regions. Finally, set
contains the flooded space that surrounds the
exterior edges of all object regions. Finally, set ![]() gives the desired result since the complement
of the external space between all object regions contains all original
foreground regions including those with filled holes. In this case, the set
difference,
gives the desired result since the complement
of the external space between all object regions contains all original
foreground regions including those with filled holes. In this case, the set
difference, ![]() gives an image with all filled holes, cracks,
or scratches. The unsupervised morphological filling algorithm will be
abbreviated as UMFA.
gives an image with all filled holes, cracks,
or scratches. The unsupervised morphological filling algorithm will be
abbreviated as UMFA.
3.3. Algorithm Comparison
From the discussion presented in Subsections 3.1 and 3.2, it can be seen that the supervised and unsupervised versions of the morphological hole filling algorithm share the same structural iterative procedure to attain their goal. However, as has been explained in detail, their main difference resides in the way the marker image is established, which in turn distinguishes their mode of operation, that is, interactive versus automatic, hence the use of a superscript for marker points within holes versus the use of the β superscript for marker points belonging to the image border.
In supervised mode we made the assumption that the number
of holes is much less than the number of pixels in a given square image, i. e. ![]() ,
which in turn is related to the number of connected or multiconnected object
regions. In unsupervised mode, the number of seed points or initial markers is
bounded by the number of pixels on the image border, i. e.
,
which in turn is related to the number of connected or multiconnected object
regions. In unsupervised mode, the number of seed points or initial markers is
bounded by the number of pixels on the image border, i. e. ![]() ,
and is derived from the manner in which the marker image is defined by means of
a mathematical function. It is not difficult to see that the variables n and m are essential to determine the computational complexity of each
algorithm. However, to date there is no explicit functional expression for the
corresponding computational complexity for parallel and sequential
implementations of both algorithms (cf. Sec. IV in Vincent (1993)
).
Nonetheless, computational tests can be based on measuring execution time or
counting the number of iterations to achieve the desired result. Execution time
is dependent on computing machinery characteristics and iteration count depends
on programming implementation either parallel or sequential. Specifically, we
will use the iteration count criterion to compare our implementation of the
morphological filling algorithms previously described.
,
and is derived from the manner in which the marker image is defined by means of
a mathematical function. It is not difficult to see that the variables n and m are essential to determine the computational complexity of each
algorithm. However, to date there is no explicit functional expression for the
corresponding computational complexity for parallel and sequential
implementations of both algorithms (cf. Sec. IV in Vincent (1993)
).
Nonetheless, computational tests can be based on measuring execution time or
counting the number of iterations to achieve the desired result. Execution time
is dependent on computing machinery characteristics and iteration count depends
on programming implementation either parallel or sequential. Specifically, we
will use the iteration count criterion to compare our implementation of the
morphological filling algorithms previously described.
4. COMPUTATIONAL TESTS ON BINARY IMAGES
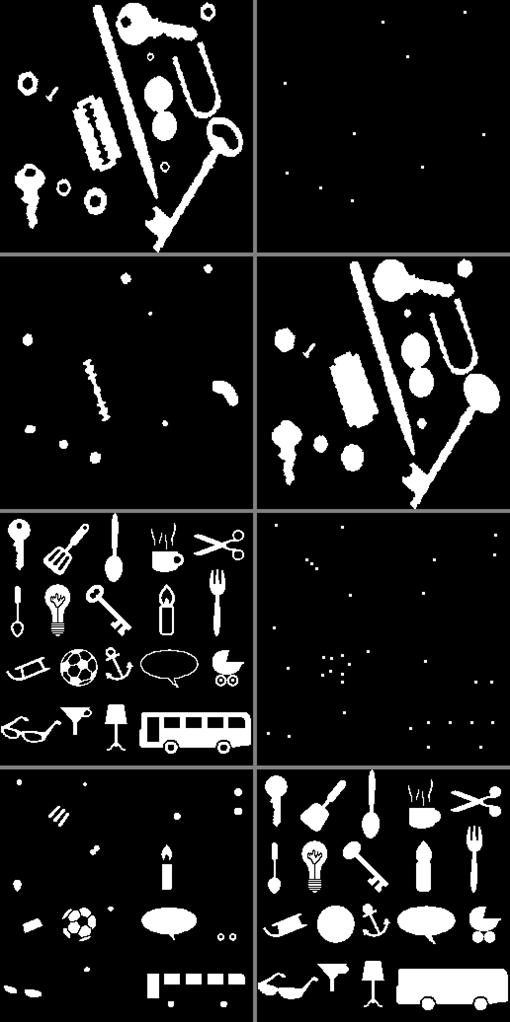
The results obtained with a computer implementation of the supervised and unsupervised morphological hole filling algorithms using the Mathcad high level programming language are presented in detail. In comparing both techniques, 15 binary images of size 256×256 pixels with WF-BB encoding were used. However, to ilustrate visually the results obtained, 8 digital binary images were selected as displayed in Figure 1. A description of all test images is listed in Table 1 where selected images for display are marked on the right with an asterisk (*).
Table 1
|
Table 1 Set of 16 Test Binary Images used for Morphological Hole Filling |
||
|
Test
Image |
Holes |
Description |
|
‘00’ |
2 |
two-hole small image 32×32 px (initial testing) |
|
‘01’ |
1 |
single
hole within a disk |
|
‘02’ |
14 |
multiple round holes |
|
‘03’ |
15 |
multiple
irregular holes |
|
‘04’ |
6 |
multiple holes of different shapes * |
|
‘05’ |
3 |
holes
and scracthes * |
|
‘06’ |
10 |
set of simple tools, several shapes * |
|
‘07’ |
34 |
several
simple object silhouettes * |
|
‘08’ |
13 |
multiple holes within particles |
|
‘09’ |
23 |
multiple
holes within irregular particles * |
|
‘10’ |
43 |
multiple small holes within cells |
|
‘11’ |
29 |
multiple
sector holes in a circular pattern * |
|
‘12’ |
30 |
holes in letters of a sample text |
|
‘13’ |
20 |
holes
in letters of unequal size & orientation * |
|
‘14’ |
57 |
multiple sized holes within a natural scene * |
|
‘15’ |
6 |
holes
within an artificial object composition |
In the following pages, the results obtained with the
supervised morphological filling algorithm (SMFA) are shown in Figure 2, Figure 3, Figure 4, Figure 5. Next, the results
obtained with the unsupervised morphological filling algorithm (UMFA) are given
in Figure 6, Figure 7, Figure 8, Figure 9. In both groups of
results the structuring element used was the straight cross ‘+’ of size 3×3 pixels whose corners are turned ‘off’
(0) and any other pixel is ‘on’ (255). For visualization purposes points within
holes, serving as markers, are displayed as white boxes of size 3×3 pxs and clearly, only the center
point is employed for operating with the SMFA. Similarly, background points on
the image border ![]() used as markers have been dilated to a 3×3 pixel size and shown in red color to
emphasize their nature. Again, only single pixels belonging to the image border
are used to operate the UMFA. The numerical values of the iteration count for
each test binary image using both algorithms with SE’s, ‘+’ (4-connectivity)
and ‘■’ (8-connectivity) are
listed in Table 2 that appears after Figure 9.
used as markers have been dilated to a 3×3 pixel size and shown in red color to
emphasize their nature. Again, only single pixels belonging to the image border
are used to operate the UMFA. The numerical values of the iteration count for
each test binary image using both algorithms with SE’s, ‘+’ (4-connectivity)
and ‘■’ (8-connectivity) are
listed in Table 2 that appears after Figure 9.
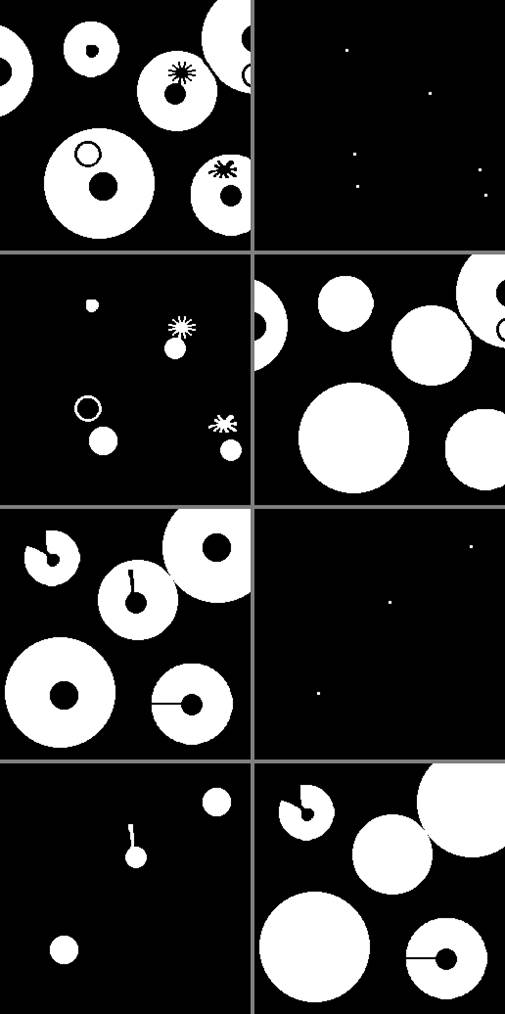
Figure 1

|
Figure 1 1st Group of 8 Sample Binary Images Selected from a set of 15 Test Images. Label Numbers from Left to Right, Top to Bottom is ‘04’, ‘05’, ‘06’, ‘07’, ‘09’, ‘11’, ‘13’, ‘14’ and Separation Between Images is Shown in Gray. |
Figure 2
|
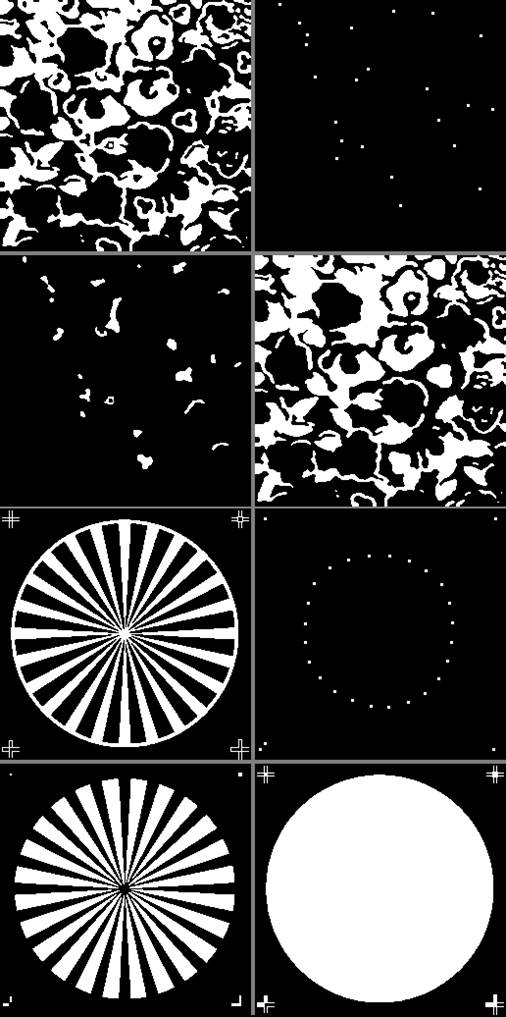
Figure 2 Results for
Binary Images ‘04’ and ‘05’ using SMFA and SE=‘+’. For Image ‘04’, 1st Row:
Left, Source Image; Right, Marker Image with 6 Points (Holes). 2nd Row: Left,
Filled Holes; Right, Source Image with Holes Filled. For Image ‘05’, 3rd and
4th Rows: Same Clockwise Sequence as in Previous Binary Image. Marker Image
has 3 Points (Holes). |
Figure 3
|
Figure 3 Results for Binary Images ‘06’ and ‘07’ using SMFA and SE=‘+’. For Image ‘06’, 1st Row: Left, Source Image; Right, Marker Image with 10 Points (Holes). 2nd Row: Left, Filled Holes; Right, Source Image with Holes Filled. For Image ‘07’, 3rd and 4th Rows: Same Clockwise Sequence as in Previous Binary Image. Marker Image has 34 Points (Holes). |
Figure 4
|
Figure 4 Results for Binary Images ‘09’ and ‘11’ Using SMFA and SE=‘+’. For Image ‘09’, 1st Row: Left, Source Image; Right, Marker Image with 23 Points (Holes). 2nd Row: Left, Filled Holes; Right, Source Image with Holes Filled. For Image ‘11’, 3rd and 4th Rows: Same Clockwise Sequence as in Previous Binary Image. Marker Image has 29 Points (Holes). |
Figure 5

|
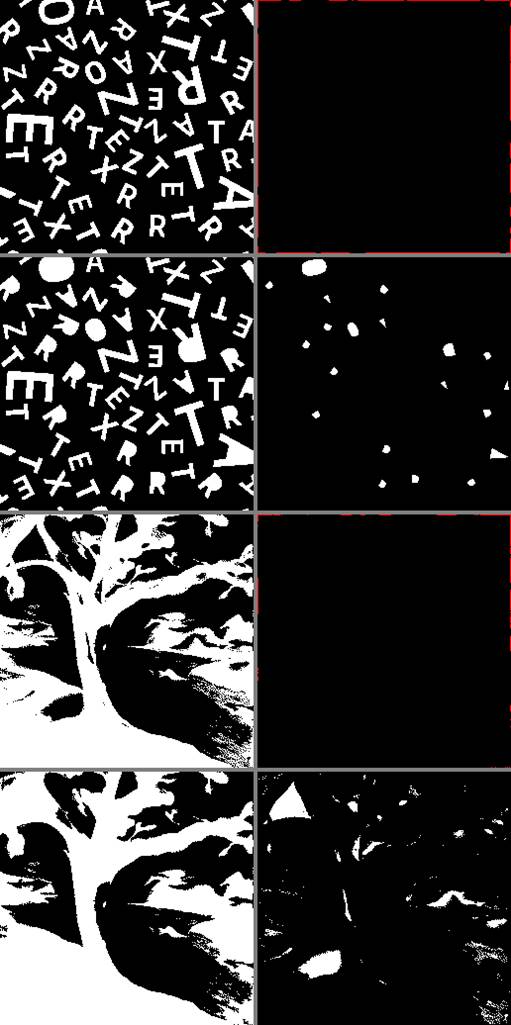
Figure 5 Results for Binary Images ‘13’ and ‘14’ Using SMFA and SE=‘+’. For Image ‘13’, 1st Row: Left, Source Image; Right, Marker Image with 20 Points (Holes). 2nd Row: Left, Filled Holes; Right, Source Image with Holes Filled. For Image ‘14’, 3rd and 4th Rows: Same Clockwise Sequence as in Previous Binary Image. Marker Image has 57 Points (Holes). |
Figure 6
|
Figure 6 Results for Binary Images ‘04’ and ‘05’ Using UMFA and SE=‘+’. For Image ‘04’, 1st Row: Left, Source Image; Right, Marker Image with Border Points (Red Color). 2nd Row: Left, Source Image with Holes Filled; Right, Filled Holes. For Image ‘05’, 3rd and 4th Rows: Same Clockwise Sequence as in Previous Binary Image. Marker Image Shows Border Points in Red. |
Figure 7

|
Figure 7 Results for Binary Images ‘06’ and ‘07’ Using UMFA and SE=‘+’. For Image ‘06’, 1st Row: Left, Source Image; Right, Marker Image with Border Points (Red Color). 2nd Row: Left, Source Image with Holes Filled; Right, Filled Holes. For Image ‘07’, 3rd and 4th Rows: Same Clockwise Sequence as in Previous Binary Image. Marker Image Shows Border Points in Red. |
Figure 8
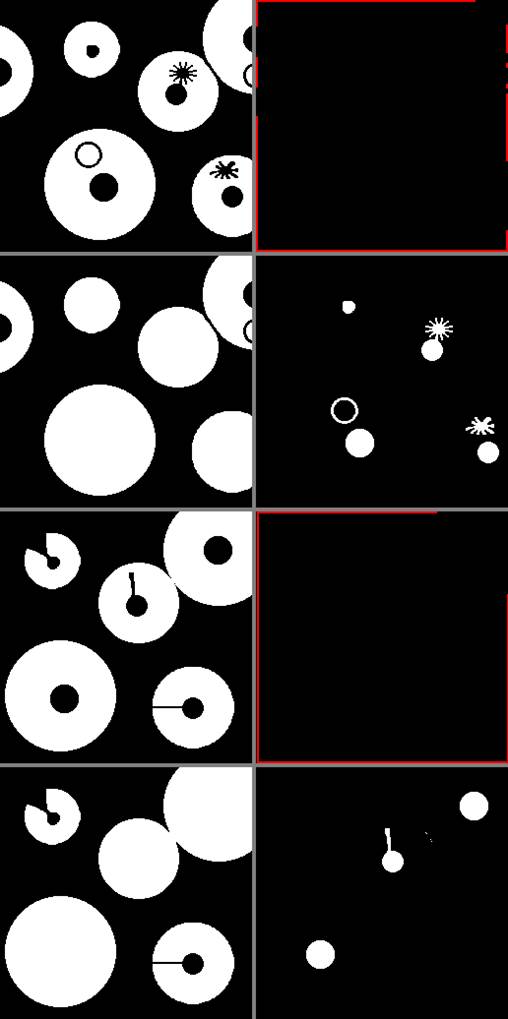
|
Figure 8 Results for Binary Images ‘09’ and ‘11’ Using UMFA and SE=‘+’. For Image ‘09’, 1st Row: Left, Source Image; Right, Marker Image with Border Points (Red Color). 2nd Row: Left, Source Image with Holes Filled; Right, Filled Holes. For Image ‘11’, 3rd and 4th Rows: Same Clockwise Sequence as in Previous Binary Image. Marker Image Shows Border Points in Red. |
Figure 9
|
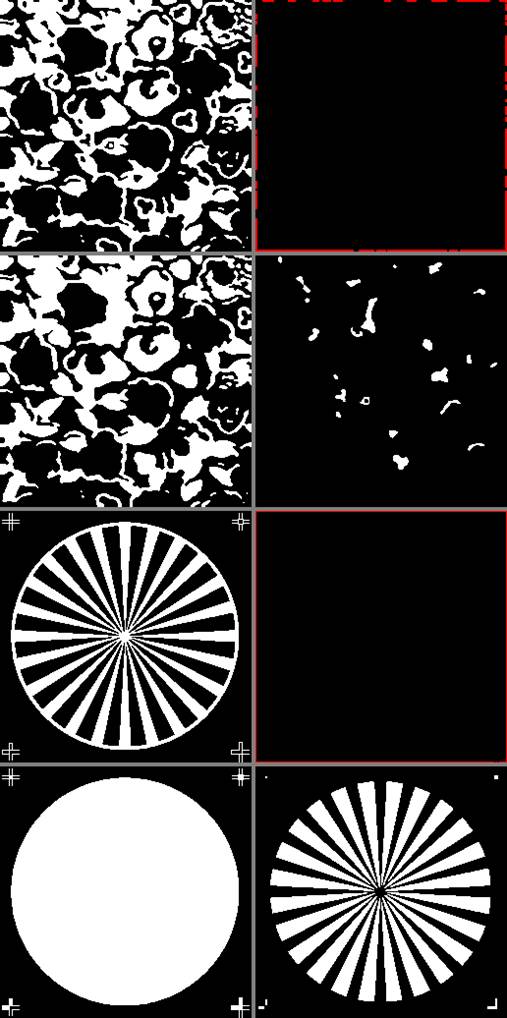
Figure 9 Results for Binary Images ‘13’ and ‘14’ using UMFA and SE=‘+’. For Image ‘13’, 1st Row: Left, Source Image; Right, Marker Image with Border Points (Red Color). 2nd Row: Left, Source Image with Holes Filled; Right, Filled Holes. For Image ‘14’, 3rd and 4th Rows: Same Clockwise Sequence as in Previous Binary Image. Marker Image Shows Border Points in Red. |
Table 2
|
Table 2 Count Iteration k for Each Test Binary Image Using Morphological Hole Filling |
|||||
|
Test Image |
Holes |
SMFA ‘+’ |
SMFA ‘■’ |
UMFA ‘+’ |
UMFA ‘■’ |
|
‘00’ |
2 |
9 |
7 |
13 |
13 |
|
‘01’ |
1 |
50 |
34 |
103 |
103 |
|
‘02’ |
14 |
12 |
9 |
287 |
255 |
|
‘03’ |
15 |
20 |
16 |
303 |
245 |
|
‘04’ |
6 |
49 |
33 |
261 |
255 |
|
‘05’ |
3 |
41 |
34 |
249 |
249 |
|
‘06’ |
10 |
43 |
32 |
315 |
255 |
|
‘07’ |
34 |
35 |
202 § |
273 |
255 |
|
‘08’ |
13 |
23 |
17 |
331 |
233 |
|
‘09’ |
23 |
36 |
340 § |
461 |
329 |
|
‘10’ |
43 |
10 |
138 § |
285 |
255 |
|
‘11’ |
29 |
111 |
75 |
91 |
91 |
|
‘12’ |
30 |
5 |
4 |
263 |
255 |
|
‘13’ |
20 |
19 |
13 |
301 |
257 |
|
‘14’ |
57 |
59 |
133 |
757 |
291 |
|
‘15’ |
6 |
330 |
305 |
255 |
243 |
Comparing the iteration count in Table 2 between the 3rd and 5th columns one can see that the k values obtained with the SMFA ‘+’ are less than those obtained by applying the UMFA ‘+’, except for test images ‘11’ and ‘15’. A similar comparison occurs between the 4th and 6th columns, where k values are greater for the UFMA ‘■’ than for the SFMA ‘■’, except for test images ‘09’ and ‘15’. In general, the number of iterations required by the SFMA is much less than the number needed by the UFMA. The difference, as explained earlier, lies in the manner the marker images are built, i. e., interactively versus autonomously. However, the greater advantage of morphological recontruction from border points against conditional dilation based on seed points within holes is that, the first one as an automatic procedure does not require user intervention. Standard actual computer equipment spends milliseconds even for greater values of k such as those obtained with the UFMA and is independent of the number of holes. In disadvantage, minutes are consumed, before applying the SFMA, in preparing a marker image that depends on the number of holes and their spatial location.
An important remark is in order. In column 4, the k value for test images ‘07’,’09’ and ‘10’ has the symbol ‘§’ meaning that “locally” there are pixels which are 8-connected to the background and therefore the use of the box ‘■’ as SE, does not work correctly in treating single pixels as part of a hole. Hence, although convergence is reached, the image results fail to be useful. Finally, as a rule of thumb, both SFMA ‘+’ and UFMA ‘+’ can be used securely in practical applications, the second being the best due to its conceptual characteristics.
5. CONCLUSIONS
In this paper, the computational performance between supervised and unsupervised morphological hole filling algorithms has been analysed mathematically using explicit and detailed arguments based on set mathematical morphology. In addition, a representative collection of binary test images were used for showing qualitatively image results obtained by running both type of algorithms as well as quantitative numerical results obtained by keeping track of the total number of iterations required for convergence. Future work contemplates, for example, the study of possible correlations between the number of holes and the number of iterations needed.
CONFLICT OF INTERESTS
None.
ACKNOWLEDGMENTS
Gonzalo Urcid thanks the National System of Researchers (SNII-CONAHCYT) in Mexico City for partial financial support through grant No. 22036. José-Angel Nieves-V. thanks TecNM campus San Andrés Tuxtla for partial financial support during the development of the present research and Rocío Morales-S. is grateful to UPAEP for taking work time to participate in this research project.
REFERENCES
Beucher, N. & Beucher, S. (2012). Mamba: Mathematical Morphology Library Image for Python Programming Language.
Bloch, I., Heijmans, H., & Ronse, C. (2007). Mathematical Morphology. In M. Aiello, I. Pratt-Hartmann, & J. Van Benthem (Eds.), Handbook of Spatial Logic. (Ch. 14, 857-875). Springer.
Dougherty, E. R. (1992). An Introduction to Morphological Image Processing. SPIE Tutotial Texts in Optical Engineering, Bellingham, Washington, USA, 9, 39-42.
Fanfeng, Z. & Wei, F. (2010). Hole Filling Algorithm Based on Contours Information. In Proceedings of 2nd International Conference on Information Science and Engineering, Hangzhou, China. IEEE Xplore, https://doi.org/10.1109/ICISE.2010.5691941
Gonzalez, R.C. & Woods R.E. (2018). Morphological Image Processing. In Digital Image Processing, 4th Global ed. (Ch. 9, 653-655 & 667-674). Pearson, New York, NY, USA.
Gonzalez, R.C., Woods, R.E., & Eddins S.L. (2020). Morphological Image Processing. In Digital Image Processing Using MATLAB, 3rd ed. (Ch. 10, 614-618). Gatesmark Publishing.
Géraud, T., Talbot, H., & Van Droogenbroeck, M. (2010). Algorithms for Mathematical Morphology. In L. Najman & H. Talbot (Eds.), Mathematical Morphology: From Theory to Application. (Ch.12, 323-352). ISTE/Wiley & Sons, UK/USA. https://doi.org/10.1002/9781118600788.ch12
Haralick, R.M., Sternberg, S.R., & Zhuang X. (1987). Image Analysis Using Mathematical morphology. IEEE Trans. on Pattern Analysis and Machine Intelligence, PAMI-9(4), 532-550, https://doi.org/10.1109/TPAMI.1987.4767941
Hasan, M.M. & Mishra, P.K. (2012). Improving Morphology Operation for 2D Hole Filling Algorithm. International Journal of Image Processing (IJIP), 6(1), 1-12.
He, Y., Hu, T., & Zeng, D. (2019). Scan-Flood Fill (SCAFF): An Efficient Automatic Precise Region Filling Algorithm for Complicated Regions, 761-769. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Long Beach, CA, USA. IEEE Xplore, https://doi.org/10.1109/CVPRW.2019.00104
Maragos, P. (1987). Tutorial on Andvances in Mophological Image Processing and analysis. Optical Engineering, 26(7), 623-632, https://doi.org/10.1117/12.7974127
Najman, L. & Talbot, H. (2010). Introduction to Mathematical Morphology. In L. Najman and H. Talbot (Eds.), Mathematical Morphology: From Theory to Application. (Ch. 1, 3-33). ISTE/Wiley, Great Britain/USA, https://doi.org/10.1002/9781118600788.ch1
Pitas, I. (2000). Shape Description. In Digital Image Processing Algorithms and Applications, 361-369. John Wiley & Sons, New York, USA.
Rivest, J-F., Soille P., & Beucher S. (1993). Morphological Gradients. Journal of Electronic Imaging, 2(4), 326-336. https:/doi.org/10.1117/12.159642.
Serra, J. (1986). Introduction to Mathematical Morphology. Computer Vision, Graphics, and Image Processing, 35, 283-305, https://doi.org/10.1016/0734-189X(86)90002-2
Soille, P. (2004). Geodesic Transformations. In Morphological Image Analysis: Principles and Aplications, 2nd ed. (Ch. 6, 183-216). Springer-Verlag, Berlin-Heidelberg, Germany.
Valdiviezo-N., J.C., Urcid, G., & Edwin, L. (2017). Digital Restoration of Damaged Color Documents Based on Hyperspectral Imaging and Lattice Associative Memories. Signal, Image and Video Processing (SIViP), 11, 937-944. https://doi.org/10.1007/s11760-016-1042-y
Van Droogenbroeck, M. (1994). On the Implementation of Morphological Operations. In J. Serra & P. Soille (Eds.), Mathematical Morphology and Its Applications to Image Processing, 241-248. Kluwer Academics, The Netherlands.
Vincent, L. (1992). Morphological Algorithms. In E.R. Dougherty (Ed.), Mathematical Morphology in Image Processing, 255-288. CRC-Press, Boca Raton, FL, USA. https://doi.org/10.1201/9781482277234
Vincent, L. (1993). Morphological Grayscale Reconstruction in Image Analysis: Applications and Efficient Algorithms. IEEE Transactions on Image Processing, 2(2), 176-201. https://doi.org/10.1109/83.217222
 This work is licensed under a: Creative Commons Attribution 4.0 International License
This work is licensed under a: Creative Commons Attribution 4.0 International License
© Granthaalayah 2014-2024. All Rights Reserved.

