
SHIPS WITH SMALL WATER-PLANE AREA: THE MAIN INFORMATION
Abstract
Ships with small water-plane area (below “SWA ships”) have very special shape of hulls. It is the reason of characteristic specificity of such ships.
SWA ships usually are multi-hull ones. And as all multi-hulls, SWA ships differ from the comparable mono-hulls by bigger deck area relative the displacement and by simple ensuring of stability.
There are some architectural types of SWA ships. Their differences are shown by the article. Relative area of deck and initial transverse stability of SWA ships are compared. Statistical data on performance: twin-hull SWA ship versus catamarans. Common specificity of seakeeping and controllability. The main external loads. Special method of designing. Main disadvantages. Conclusions, recommendation.
Keywords
Ship, WaterPlane Area, Stability, Seaworthiness, Natural Period Of Motion, Motion Mitigation, Performance, Structure Strength, Method Of Designing
INTRODUCTION
BRIEF HISTORY
The first patents on SWA ships were received at the begin of XX century. (Dubrovsky & Lyakhovitsky, 2001). Semi-submersible platforms, which wave small water-plane area too, were built from the middle of the same century. About 300 units of them were built before the century end. And SWA ships are researched from 60-years, the first such ships were built at 70-th begin. Today about a hundred of SWA ships work at the world. Figure 1 shows the shape of SWA ship hulls.

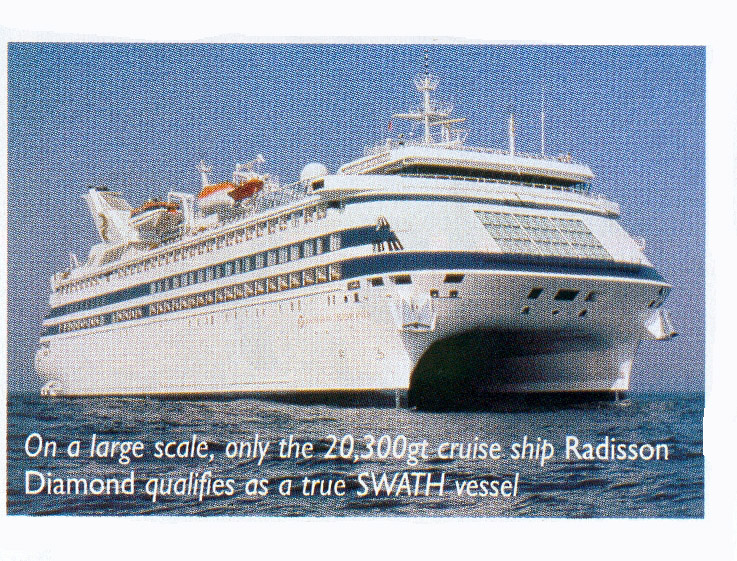
Built SWA ships have various displacement and purpose. Figure 2 shows the biggest built SWA ship.
But maximal technical effects is shown by vessels of small and middle dicplacement, for example – Figure 3 .

SWA SHIP TYPES
Today twin-hull SWA ships are most applicable at the world, some outrigger SWA ships were built too. Some SWA ship types were more or less researched (Dubrovsky, Matveev, & Sutulo, 2007), Figure 4 .
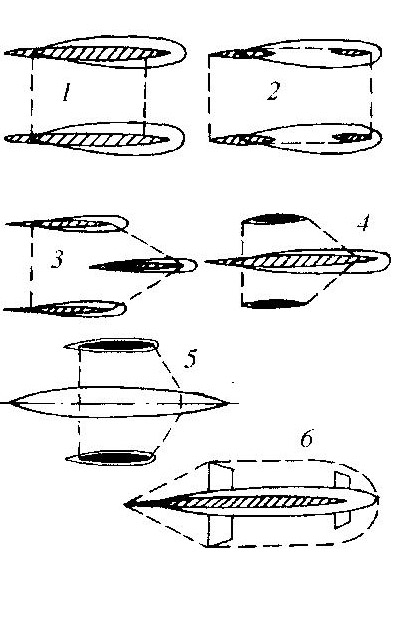
Type variability of SWA ships ensures application for various practical purposes.
GENERAL AND PARTICULAR SPECIFICITIES OF SWA SHIPS
As all multi-hulls, SWA ships differ from mono-hulls by following specificities:
-
increased area of decks relative to displacement;
-
simple ensuring of the transverse stability by the transverse distance between hulls;
-
possibility of using of various hulls, including ones with very high lengthening and hulls without own transverse stability;
-
increased relative mass of hull structure relative to displacement, but decreased such mass relative deck area;
-
increased relative wetted area; it means worse performance at low relative speeds.
Besides, SWA ships differ from the other multi-hulls by the following specificities:
-
bigger relative draft; it allows bigger diameter of propulsors, i.e. higher propulsive coefficient;
-
possibility of sufficient changing of draft by small enough volumes of water ballast; it allows designing of SWA ships with design draft equal to the gondola height for shallow water and harbors; the draft of such ships can be increased at deep waved sea for better seakeeping;
-
straight dependence of overall beam from the selected rules of initial stability;
-
decreased longitudinal initial stability; it means the need of the stability standardization and strut placement on the base of the standard; besides, decreased stability means some problems with ensuring of damage attitude and stability;
-
increased effectiveness of any system of motion mitigation;
-
big enough (up to 90%) part of flat, cylindrical, conical sections in the hull structures.
Besides, each SWA ship type has own specificities too. For example:
-
duplus ensures the biggest – from SWA ships – initial transverse stability;
-
trisec can have minimal relative area of water-plane;
-
tricore can ensure maximal favorable hydrodynamic interaction of generated wave systems; it ensures high propulsive characteristics;
-
SWA ships with outriggers, especially proa, have minimal – from SWA ships – relative mass of metal hull, i.e. are most cheap at building and exploitation; outrigger SWA ships with pulling propellers at the side gondolas can have minimal level of under-water noise.
DECK AREA
Table 1 contains the comparison of relative deck area of conventional mono-hull and various SWA ships.
|
Ship type |
Relative length of hull |
Most possible correlations of main dimensions |
Relative area of deck. |
|
Conventional mono-hull |
lMON=L/V1/3 |
L/B=8; AUD~0.8 |
0.1*L2 |
|
Duplus ot trisec |
l1=0.8*lMON |
L1=0.64*L; BOA=(0.3÷0.5)*L1; AUD~1.0 |
(0.19÷0.32)*L2 |
|
With two outriggers |
l1=0.8*lMON |
L1=0.8*L; Lo=(0.3÷0.4)*L1; BOA=(0.3÷0.5)*L1; |
(0.18÷0.3)*L2 |
|
Tricore |
l1=0.5*lMON |
L1=0.35*L; LOA=1.6*L1; BOA=(0.6÷0.8)*L1; |
(0.08÷0.1)*L2 |
Here: L – mono-hull length; V– volume displacement of the mono-hull; L1 – a hull length of SWA ship; LO– outrigger length; lMON – relative length of mono-hull; l1 - relative length of a hull of SWA ship; AUD – fullness coefficient of upper deck; B – mono-hull beam; BOA– overall beam of SWA ship.
Evidently, relative area of SWA ship deck about the same or slightly bigger, than of the comparable mono-hull.
INITIAL STABILITY
Initial transverse stability of SWA ships is about the same, as of comparable mono-hulls. Longitudinal stability of SWA ships is smaller always; it has positive and negative results. Often setting of longitudinal stability norms is necessary; and setting of transverse stability is necessary always, as for any ship types.
Minimal water-plane area of a SWA ship is defined by general arrangement (engine placement) and by transverse strength. If the area is selected, the needed transverse stability defines overall beam of a SWA ship.
The standard of initial transverse stability of US Navy is simple enough and is very convenient for early stages of SWA ship designing: a ship at rest must have heel no more, than 10 degrees at side wind with speed 100 knots (unrestricted region of sailing) or 50 knots (restricted region).
The standard was used for selection of transverse dimensions of some SWA ships for examples, see Table 2 .
|
Ship type |
Duplus |
Trisec |
Tricore |
With two outriggers |
|
Hull length/ overall length, m |
47/47 |
47/47 |
40/65 |
65/65 (35) |
|
Hull beam/ overall beam, m |
5/19 |
5/22 |
3.5/22 |
7(1.5)/20 |
|
Area of side hull water-plane, sq m. |
65 |
45 |
50 |
40 |
|
Design draft/ hull depth, м |
4/11.5 |
4/11.5 |
4/11.5 |
4(2)/11.5 |
|
Volume center height/ Mass center height, м |
2.5/7 |
2.5/7 |
2.5/7 |
2.5/7 |
|
Metacentric radii / Metacentric height, m |
6.5/2 |
6.5/2 |
8.5/4 |
7/2.5 |
The condition of the same trim and heel after shift of the same cargo along and across ship can be used for selection of the longitudinal stability. Than the minimal metacentric heights will be proportional to overall dimensions.
SEAWORTHINESS
The value of water-plane area defines the main advantage of SWEA ships: maximal possible seakeeping for ships without deeply submerged foils.
The same area defines very high effectiveness of any motion mitigation.
In general, seakeeping of a SWA ship is comparable with the same characteristic of the mono-hull of bigger at 5 – 15 times displacement (in dependence from achievable area of water-plane).
The main results of water-plane area decreasing:
-
Decreasing of disturbing forces and moments of motions;
-
Decreasing of longitudinal stability and natural periods of motions;
-
Sufficient decreasing of added resistance in head waves.
Big natural periods of motions defines head and side waves as most favorable for SWA ships, and following waves as most unfavorable ones. Slow enough SWA ships without motion mitigations have resonant motions with big enough amplitudes, but small enough accelerations. It is big difference with mono-hull motions, their resonant motions have big enough amplitudes and very big accelerations.
Smaller disturbing forces and moments of SWA ships define very high effectiveness of any mitigation systems: active under-water foils, stern flaps, flow interceptors for high-speed and fast vessels; activated by air mitigation tanks are effective enogth for slow-speed SWA ships and for all SWA ships at rest.
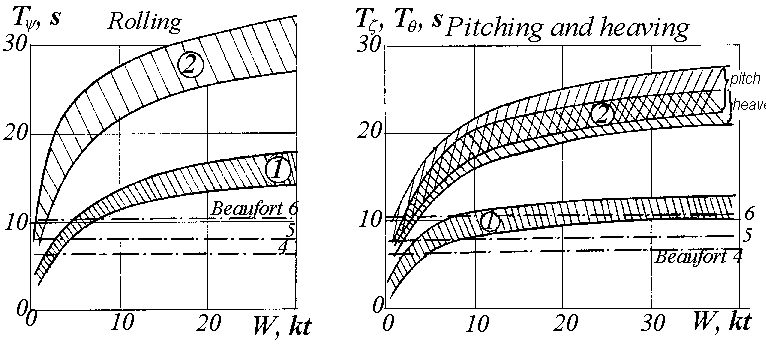
Difference of natural periods defines to seemed periods of motions at sea waves, see Figure 6 .

Evidently, pitch amplitudes of a SWA ship decrease with speed growth, but theses amplitudes of the ship with conventional shape increase.
Unfortunately, vertical accelerations of pitch growth at both cases, see Figure 7 .
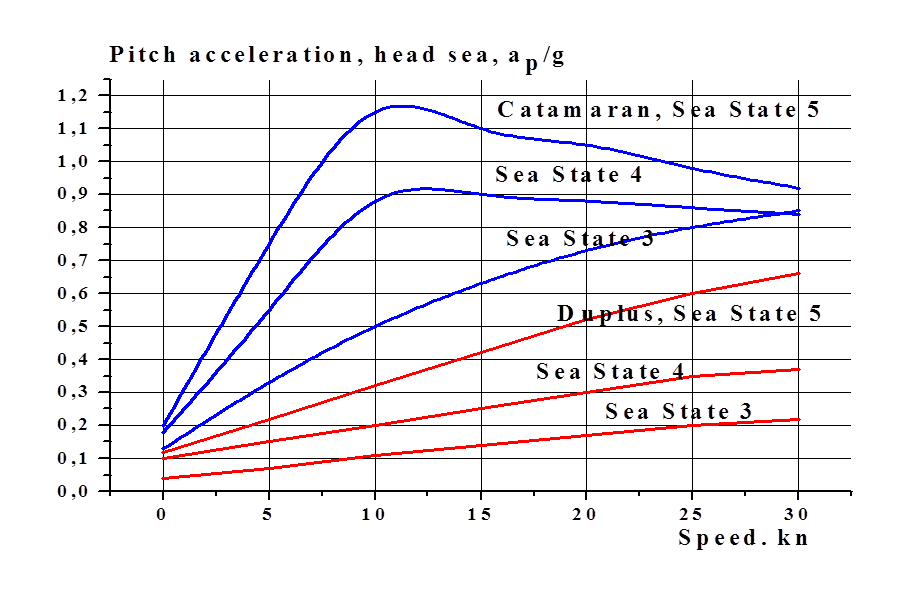
Fortunately, vertical accelerations of duplus growth with speed slowly enough. For example, if the acceleration 0.4g is the standard, the requirement does not limit the examined duplus speed at Sea Strate 3 and 4, and allows the speed about 14 knots at Sea Staste 5. On the contrary, the achievable speeds of examined catamaran are 7, 3 and 2 knots, accordingly, for the same sea states.
Usually ship speed at head waves are restricted by vertical accelerations. For example, Figure 8 shows the achievable speeds of two ships of the displacement 1000 t at head waves for the same acceleration limit (0.4g).

Big enough supply of engine power is useful for SWA ships, because their speed does not drop at head waves.
PERFORMANCE
Bigger immersion of the main wave-generating volume and bigger possible diameter of propulsors ensures to SWA ships better performance, for example, Figure 9 (on the base of data (Yun, Bliault, & Huanzongrong, 2016)).
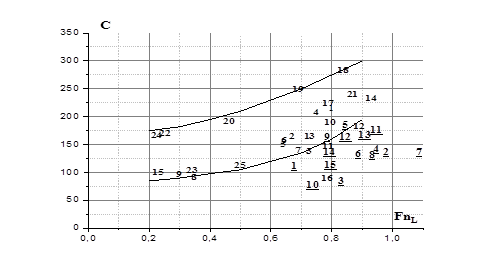
The picture show the desirable values of duplus relative speeds for effective application of twin-hull SWA ships.
Strength
As for all multi-hulls, the transverse strength is very important for SWA ships.
Usually examination of transverse bending moment at side waves and at rest is enough for early stages of SWA ship designing. It is stated, for example, (, 2004), the moment is defined by horizontal velocities in wave, Figure 10 .
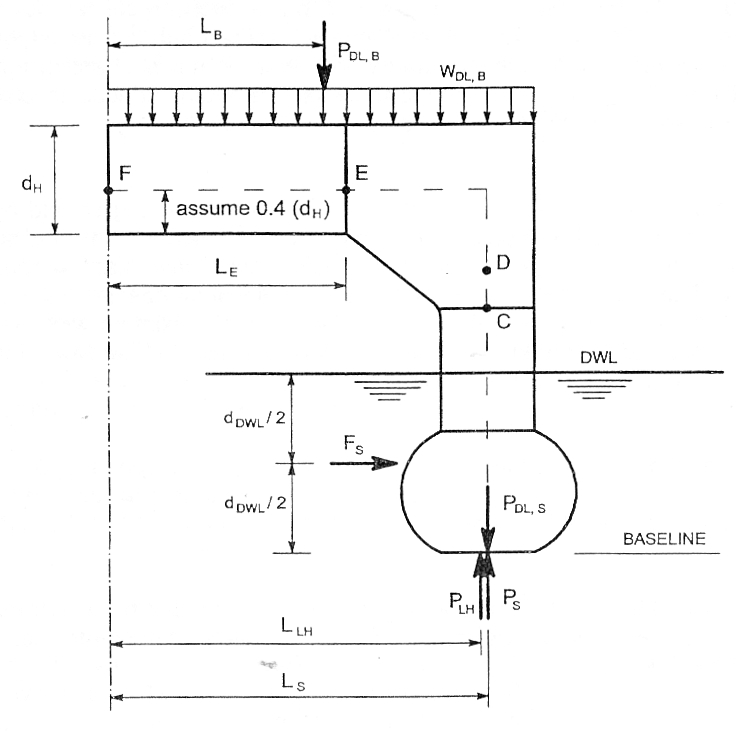
Transverse bulkheads counteract to the moment most effectively. Each bulkhead is at the same vertical plane in the above-water structure, at strut and in the gondols (underwater volume).
The strut is most loaded at the begin of its expansion. If the plate thickness at the strut place is applied for all structure, the assumption allows to estimate the plating thickness of all SWA ship structures, (Dubrovsky et al., 2001), Figure 11 .
Если допустить, что необходимая толщина обшивки в этом сечении распространяется на всю конструкцию корпуса, то это допущение позволяет оценить необходимую толщину обшивок СМПВ, (Dubrovsky et al., 2001), рис. 11.
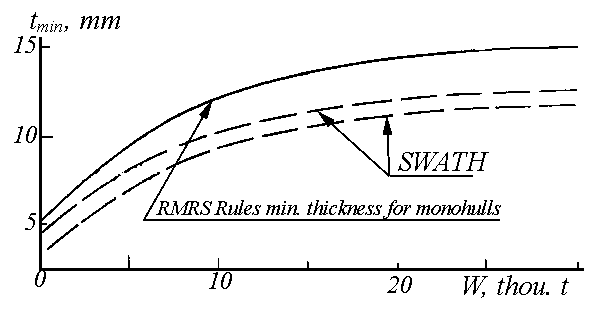
So defined thicknesses allows estimate hull structure mass of a SWA ship, if the overall dimensaions are defined previously. Such mass estimation, at own turn, strightly allows dimension selection of SWA ship at early stages of designiung without prototypes.
MANEUVERABILITY
As all multi-hulls, SWA ships differ by higher stability on course, i.e. decreased controlability, Figure 12 (Dubrovsky et al., 2001)..
.
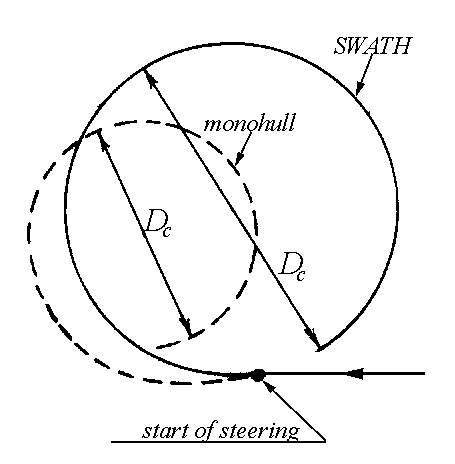
Decreased longitudinal stability of SWA ship defines sufficient changing of dynamic attitude at circulation. And there is a referse effect: controlled changing of dynamic attitude by hgorizontal rudders allow change the course withjout vertical rudders, as Figure 1 .
SPECIFICITY OF DESIGNING
The specificity of technical characteristics of SWA ships defined the rational specificity of their designing.
Firstly, usually a designed SWA ship has nothing near enough prototype. It dictates the need of straight definition of all technical characteristics.
The initial point of such selection of dimensions is the needed deck area as the main initial demand for designing. The next steps of designing include variations the main dimensions at the previously defined ranges, firstly – plane dimensions.
Initial area of decks allows to define overall dimensions; the maximal permissible draft is recommended as zero approximation. The vertical clearance can be selected by some existed statistic. Then hull depth is defined by selected number of inner decks and by height between them. After the thickness selection, see Fig. 11, hull structure mass can be defined at zero approximation. Full displacement can be defined at zero approximation after estimation of needed power of main engines, fuel supply, needed cargoes by approximate statistic.
Than the dimensions are defined more exactly at the first and second approximation. Usually it is enough for concept designing – without added model tests and calculations.
DISADVANTAGES OF SWA SHIPS
As all multi-hulls, SWA ships have the following disadvantages:
Как все многокорпусные объекты, СМПВ имеют следующие недостатки:
-
increased part of structure mass relative to full displacement (but the same part is decreased relative the deck area.) It must be noted, the dimensions of some ship types, for example, of battle ships, are defined by the needed area of decks.
-
increased overall beam;
-
increased wetted area; it means worse performance at relative small speeds.
-
увеличенную габаритную ширину (но обычно – уменьшенную длину);
Small water-plane area defines some special disadvantages of SWA ships:
-
decreased longitudinal stability usually means the problems with damage attitude and damage stability ensuring; the problem can be solved by filling of end underwater apartments by fireproof foam blocks; the method can compensate small under-water volume near design water-plane too;
-
increased natural periods of motions mean big enough amplitudes of pitch at following waves; the disadvantage can be compensated by various motion mitigation systems, which are effective enough for all SWA ships;
-
small beam of struts is very uncomfortable from main engine arrangement;
-
common disadvantage of all multi-hulls, slamming of wet deck, is not so important for SWA ships because their usual decreased motions;
-
as all multi-hulls, SWA ships are not convenient for sailing in ice; but it can be noted, a lot of fast enough small- and middle sized mono-hulls (as battle ships) are not convenient for ice too.In general, it must be noted, there are not ship types, which are optimal for all conditions, speeds and purposes. Ship type must be selected for any purpose and sailing conditions by detail prediction of possible technical and economic characteristics. And designing methods must compensate the disadvantages of any types of ships for needed conditions.
CONCLUSIONS AND RECOMMENDATION
-
Sufficient increasing of seaworthiness of sea-going ships of small and middle displacement can be ensured by application of hull shapes with small water-plane area.
-
Ships for light enough useful payloads, so named “capacity carriers”, are most effective from economy point of view, if they have small water-plane area, for example, various passenger ships, ferries, combat ships, science and patrol vessels, etc .
-
Alternative designing of options with small water-plane area is recommended at the earlier stages of designing of all “capacity carriers”.
