
|
|
|
|
NON-LINEAR FINITE ELEMENT ANALYSIS OF DYNAMIC PROBLEMSO.H. Aliyu *1
|
|
|
|


Article Citation: O.H. Aliyu, and A.A
Salihu. (2021). NON-LINEAR FINITE ELEMENT ANALYSIS OF DYNAMIC PROBLEMS. International
Journal of Engineering Technologies and Management Research, 8(4), 79-93. https://doi.org/10.29121/ijetmr.v8.i4.2021.926
Published Date: 29 April 2021
Keywords:
Nonlinear
Analysis
Material
Non-Linearity
Geometric
Non-Linearity
Linearization
Joint Rotation
ABSTRACT
A formulation of the displacement based finite element method as well as the incremental analysis procedure which is considered suitable for analysis of non-linear dynamic problems is presented. The presented framework is used to investigate the influence of joint rotation on the failure of steel beam subject to high-speed impact load. The results from the non-linear numerical simulation are compared with those obtained from an analytical technique.
Method: The non-linear Full Newton Raphson method was used for the simulation and results obtained were verified analytically using the energy momentum balance technique.
Results: The beam suffered an initial vertical downward deflection of 27.7mm from the impactor load as well as a joint rotation of 20.
Findings: From the results obtained the beam was considered to have failed due to excessive rotation. Similarly, from the comparism made between the analytical and non-linear numerical simulation results, it was concluded that the full Newton Raphson technique gave accurate results in simulating the dynamic problem which was achieved at an affordable cost.
1. INTRODUCTION
The
analysis of damage in materials and structures subjected to dynamic loadings
such as blast, impacts, earthquake, fire and so on, is considered crucial. For
such dynamic loadings (generally involving plasticity and damage), the complete
displacement form of finite element analysis is mostly used especially where
material non-linearity is considered. This displacement version of finite
element analysis is generally easier to implement particularly for complicated
non-linear constitutive relations. It also offers the advantage of properly
modelling the element behaviour (Stein, 1993; De
Borst et al, 2012; Aliyu, 2019).
In this
paper, the non-linear finite element method is applied to the material’s
non-linear problem involving a steel beam subjected to impact loads. The method
was used to study the deformation and rotation of the beam to the dynamic
impact loads. The accuracy of the non-linear finite element simulation results,
in assessing deformation was compared to those obtained from comparable hand
calculations and has proved to be quite satisfactory.
2. FORMULATION OF THE NON-LINEAR FINITE ELEMENT METHOD
2.1. FORMULATION OF THE WEAK FORM OF THE EQUATION OF MOTION
In
arriving at the non-linear finite element expression for solving dynamic
problems we begin by adopting the concept of equilibrium and virtual work in
obtaining an expression for the equation of motion where the idea of linear
momentum balance is assumed.
First, we
consider the balance of momentum between the body V as well as its boundary S
with the stress vector t and gravity
acceleration put together in the vector g
resulting in the linear momentum balance expressed as:
![]()
The
above expression momentum balance can be further adjusted to give the
expression as shown in eqn. (1.1)
![]()
Now
applying the Gauss divergence theorem to the first expression in eqn. (1.1)
converts it from a surface integral to a volume integral expressed in eqn.
(1.2) after rearrangement.
![]()
The
integrand in eqn. (1.2) must be equal to zero which gives the local form of the
balance of linear momentum also called the equilibrium equation or the equation
of motion in the strong form which is thus expressed
in eqn. (1.3) (Laursen,
2003; De Borst et al, 2012):
![]()
Where:
![]() Is
the mass density
Is
the mass density
![]() Is the differentiation of displacement
with respect to time
Is the differentiation of displacement
with respect to time
![]() Is
the matrix format of the gradient vector operator at the deformed configuration
Is
the matrix format of the gradient vector operator at the deformed configuration

![]() .
.
By inserting eqn. (2) in eqn.(1) the equation of motion can
be rewritten in matrix form as
![]()
In
adopting the principles of virtual work, equation (3) is further transformed
into a weak form as given in eqn. (5) after applying the divergent theory to
eqn. (4) which was arrived at by multiplying by a virtual displacement ![]() to
eqn. (3) and integrating over the domain V (which is the current configuration)
(Kim 2018; De Borst et al, 2012).
to
eqn. (3) and integrating over the domain V (which is the current configuration)
(Kim 2018; De Borst et al, 2012).
![]()
![]()
It
can therefore be seen from equation 5 that the weak form is a balance between
the internal virtual work and the external virtual work (i.e., the body forces
and surface traction) (Kim, 2018). It is important to stress that, in the
arriving at the expression in equation 5, no guess was made with respect to the
material behaviour or size of the spatial displacement gradients. Hence,
equation 5 can be used for both linear and non-linear behaviours.
2.2. DISCRETIZATION; FINITE ELEMENT FORMULATION
In
this section the displacement based finite element formulations are
discussed. This section starts with
finding the approximate solution to the above weak form of equation of motion.
For this method, the element nodal displacements ![]() having components (
having components (![]() ,
,![]() ,
,![]() ) is regarded as the unknown in the
assumed continuous displacement field (u)
given in eqn. (6) for each finite element used in the spatial finite element
discretization.
) is regarded as the unknown in the
assumed continuous displacement field (u)
given in eqn. (6) for each finite element used in the spatial finite element
discretization.
![]()
Where:
![]() is
the shape or interpolation polynomial function expressed in natural
dimensionless coordinates
is
the shape or interpolation polynomial function expressed in natural
dimensionless coordinates ![]() .
.
In
order to evaluate the displacement field, for points within the elements which
are not key points (i.e., not nodal points) eqn. (7) is adopted.
![]()
The
element strain, given in terms of the derivative of the displacement field (u) is obtained from eqn. (7.1) (Laursen, 2003; De Borst et al, 2012; Hartmann, 2005)
![]() Lu
Lu ![]()
It
should be noted that the measure of strain tensor to be used in equation 7.1
has not been specified as the equation is expected to be used in both linear
and non-linear regime as mentioned above in the formulation of the weak form of
the equation of motion.
![]()

![]()
Where:
![]() gives the matrix of shape function for the 3d
element
gives the matrix of shape function for the 3d
element
![]() is the matrix vector of the displacement
degree of freedom at the nodal points of each element in the finite element
mesh.
is the matrix vector of the displacement
degree of freedom at the nodal points of each element in the finite element
mesh.
While
eqn. (9) maps the element displacement vector (![]() )
to the global displacement vector (
)
to the global displacement vector (![]() ) using the incidence matrix (
) using the incidence matrix (![]() )
(De Borst et al, 2012; Hartmann, 2005)
)
(De Borst et al, 2012; Hartmann, 2005)
![]()
Substituting
eqns. (7) and (9) into the weak form of equation (5) gives equation of motion
for the entire finite element mesh expressed as shown in eqn. (10):

Solution
of equation (10) for every virtual displacement (![]() )
leads to a
semi-discrete balance of momentum as expressed in eqn. (11) since the
discretisation here pertains only to the spatial domain and not to the time
domain (De Borst et al, 2012).
)
leads to a
semi-discrete balance of momentum as expressed in eqn. (11) since the
discretisation here pertains only to the spatial domain and not to the time
domain (De Borst et al, 2012).
![]()
Where:
![]() Is
the mass matrix
Is
the mass matrix

![]() Is
the external force vector
Is
the external force vector

![]() Is
the internal force vector
Is
the internal force vector

![]() Is the matrix that relates the strains
within the finite elements to the nodal displacements expressed as the
derivative of the shape function as given in eqn. (16) (The above definition
for
Is the matrix that relates the strains
within the finite elements to the nodal displacements expressed as the
derivative of the shape function as given in eqn. (16) (The above definition
for ![]() holds for a linear expression, for a
non-linear expression, it relates the variations of strains within the finite
elements to the variations of the nodal displacement) (De Borst et
al, 2012; Hartmann, 2005).
holds for a linear expression, for a
non-linear expression, it relates the variations of strains within the finite
elements to the variations of the nodal displacement) (De Borst et
al, 2012; Hartmann, 2005).
![]()
The
shape function ![]() has been expressed in dimensionless
isoparametric natural coordinates in order to facilitate the numerical
integration of the integrals where complex non-linear structural geometries as
well as material non-linearities are involved (Stein, 1993; De Borst et al, 2012; Seshu, 2012).
has been expressed in dimensionless
isoparametric natural coordinates in order to facilitate the numerical
integration of the integrals where complex non-linear structural geometries as
well as material non-linearities are involved (Stein, 1993; De Borst et al, 2012; Seshu, 2012).
Isoparametric
finite elements have been used for this formulation as the same shape function ![]() given in eqn. (17) has been used for both
the geometrical and displacement interpolations.
given in eqn. (17) has been used for both
the geometrical and displacement interpolations.
![]()
Where:
equation 17 is a linear relationship in isoparametic coordinates
![]() are the shape functions
are the shape functions
![]() gives all the finite element nodal points
gives all the finite element nodal points
![]() are the nodal point displacements
are the nodal point displacements
2.2.1. LINEARIZATION
Nonlinear
problems almost always result in nonlinear equations which have to be solved by
first linearizing the nonlinear equations and then solving the linearized
equations (i.e., getting the roots of the equation) iteratively using
appropriate techniques (such as: Newton Rahpson technique, Arc length or path
following method as well as the line search method) until the solution to the
problem is obtained. On the other hand, the linearized equations can be solved
directly using some other solution technique, which does not require iterative
solution method. The focus here is on
iterative solution technique using the Newton Rahpson method where correct
linearization of the nonlinear equation is key to getting an accurate solution
by ensuring quadratic convergence.
2.3. INCREMENTAL ANALYSIS
For
the non-linear analysis, the application of external load ![]() as in eqn. (11) is done incrementally,
that is, in load steps as opposed to the sudden application of the full
external load in one single load step (Stein, 1993). This
is because the set of algebraic equations which evolves as a result of finding
the solution to the finite elements is non-linear. Similarly, the application
of load incrementally enables the proper convergence of the solution (De Borst et al 2012; Kim, 2018).
This is the preferred approach especially for rate dependent materials where
the stress depends upon the history of deformation (or straining) (Laursen, 2003; Ayoub &
Filippou 1998; Kim, 2018).
For such materials, accurate modelling of behaviour under loading can only be
achieved if the history of straining is carefully followed. Hence, justifying
the need for incremental load application which allows for small strain
increments to be achieved, enabling the straining path to be carefully followed
(Laursen, 2003). Hence, for this incremental load
process, equation (11) becomes reduced to:
as in eqn. (11) is done incrementally,
that is, in load steps as opposed to the sudden application of the full
external load in one single load step (Stein, 1993). This
is because the set of algebraic equations which evolves as a result of finding
the solution to the finite elements is non-linear. Similarly, the application
of load incrementally enables the proper convergence of the solution (De Borst et al 2012; Kim, 2018).
This is the preferred approach especially for rate dependent materials where
the stress depends upon the history of deformation (or straining) (Laursen, 2003; Ayoub &
Filippou 1998; Kim, 2018).
For such materials, accurate modelling of behaviour under loading can only be
achieved if the history of straining is carefully followed. Hence, justifying
the need for incremental load application which allows for small strain
increments to be achieved, enabling the straining path to be carefully followed
(Laursen, 2003). Hence, for this incremental load
process, equation (11) becomes reduced to:
![]()
Where
the inertial term is omitted.
For
loading to be applied sequentially, the time parameter is used to order the
sequence of loading (that is the load steps or increments) (Laursen, 2003). In line with this preceding statement,
the unknown stress vector ![]() is additively decomposed as expressed in eqn.
(19)
is additively decomposed as expressed in eqn.
(19)
![]()
Where:
![]() Is when the stress component is known at
the time t
Is when the stress component is known at
the time t
![]() Is
the unknown component of the stress increment
Is
the unknown component of the stress increment
Using
eqn. (19) in eqn. (18) above with eqn. (15) gives the expression in eqn. (20)

Where,
the second term in the right side of eqn. (20) above represents the internal
virtual work done. Since the volume of the element (![]() ) where the integral in eqn. (20) applies
is not known at the time
) where the integral in eqn. (20) applies
is not known at the time![]() ,
it can be solved by
mapping it back to reference configuration (i.e., the Lagrangian
configuration).
,
it can be solved by
mapping it back to reference configuration (i.e., the Lagrangian
configuration).
![]()
Equation
(20) above can equally be written as in eqn. (21) since we are concerned here
with linearizing the source of geometric non-linearity (i.e., the nodal
displacements) and removing the dependence on it. Equation (21.1) is the
unbalanced force at the nodes:


Where:
![]() is
the internal force vector evaluated at the time t where
is
the internal force vector evaluated at the time t where ![]() (Wang & Hsu, 2001; De Brost et al.2012)
(Wang & Hsu, 2001; De Brost et al.2012)
Because
of the non-linear nature of equation (21) its solution necessitates the need
for an iterative approach. To achieve this, the non-linear equation must first
be linearised and then solved iteratively. The most frequently used iterative
method is the Newton-Raphson method which entails working out the residual as
well as the tangent stiffness matrix for each iteration from the weak form (Wang & Hsu, 2001; Ayoub & Filippou 1998; Hartmann,
2005; Tsavadaris, & Mello, 2012; Barth, & Wu, 2006; Kim 2018). As
mentioned before, the solution of non-linear equations, entails iterative
linearization of the governing equations.
For example, linearizing the dependence of the stress increment to the
displacement increment expressed as shown in eqn. (23) remembering of course
that no guess has been made
with respect to the material behaviour (i.e., the stress and strain measure) as
mentioned earlier on page 4 (Laursen, 2003; De
Brost et al.2012).
The increase in stress is expressed as in eqn. (22) which is then linearized as
expressed in eqn. (23)
![]()
![]()
With
![]()
Where:
![]() Is
referred to as the material tangential stiffness matrix
Is
referred to as the material tangential stiffness matrix
Equation (23) can therefore be rewritten as:
![]()
(Laursen,
2003; De Brost et al.2012; Kim, 2018).
With
the quasi-static loading, eqn. (18) written as:
![]()
This
can be further expressed as in eqn. (27)
![]()
Where:
![]()
![]() is the work conjugate strain measure
is the work conjugate strain measure
Remembering
of course that no
assumptions have been made here, with respect to the nature of the stress or
strain measures.
Considering
equations (7), (9), (16) and (25), in the above non-linear expression of eqn.
(21) leads to the linearized equation for finite load increment which is given
in eqn. (28)

With
the loading steps, ranging from time ![]() to
time
to
time![]() The material tangential stiffness matrix K is equally expressed as in eqn.
(28.1). Since the increase in nodal displacement does not rely on the spatial
coordinates, it can also be placed outside of the integration.
The material tangential stiffness matrix K is equally expressed as in eqn.
(28.1). Since the increase in nodal displacement does not rely on the spatial
coordinates, it can also be placed outside of the integration.

Hence
equation (28) can be rewritten as:
![]()
or![]() with the external force vector additively
decomposed and expressed as in eqn. (29.1)
with the external force vector additively
decomposed and expressed as in eqn. (29.1)
![]()
These
linearizations of the load steps as given in eqn. (29) as well as the
linearization of the governing stress-strain equation given in (25) tend to
move the solution away from the actual equilibrium solution (especially when
the initial estimate of the assumed displacement is too far from the actual
solution). This divergence can be reduced by incorporating equilibrium
iterations inside each loading step. With this incremental-iterative solution
technique, the initial displacement estimates are derived as follows:
![]()
Where:
![]()
The
subscript 0 signifies the beginning steps while subscript 1 refers to the first
iteration. Hence, the beginning internal force is expressed as:

Where:
![]() is the determinant of the Jacobian used
in the transformation between the natural isoparametric coordinates (
is the determinant of the Jacobian used
in the transformation between the natural isoparametric coordinates (![]() ) and the corresponding Cartesian
coordinates (
) and the corresponding Cartesian
coordinates (![]() ) (see figure 1)?
) (see figure 1)?

Figure 1: shows the concept of transformation
between isoparametric and Cartesian coordinates adapted from Stein 1993.
The
stress ![]() after
the beginning steps (that is the stress in the first iteration) is then derived
from eqn. (33)
after
the beginning steps (that is the stress in the first iteration) is then derived
from eqn. (33)
![]()
As
initially mentioned, there is usually a divergence of the actual true solution
from the equilibrium solution which is why the original force vector ![]() evaluated using the stress
evaluated using the stress ![]() from the first iteration (as given in
equation 33) is not in equilibrium with the external loads
from the first iteration (as given in
equation 33) is not in equilibrium with the external loads ![]() suggesting
the need for a correction to the displacement increment. The correction of the
displacement increment is obtained using the following expression:
suggesting
the need for a correction to the displacement increment. The correction of the
displacement increment is obtained using the following expression:
![]()
![]()
![]() Is
the updated tangential stiffness matrix
Is
the updated tangential stiffness matrix
![]() Is the residual force
Is the residual force
Following
the pattern of equations (34) and (35) higher iterations can be worked out
after the convergence of solution is attained for each lo
ad step until when the
residual vanishes. The equations (36) below summarise this correction process

Where the last three steps in eqn. 36 are usually
performed for each integration point.

|
Figure 2: a). Purely incremental solution
procedure |
b). Incremental-iterative
solution procedure |


The
above figure shows the improvement in numerical results from the pure
incremental solution technique to incremental-iterative solution technique
where equilibrium iterations has been applied to each loading step. Fig. 2.1
shows a detailed graphical description of how the displacement corrections are
added for a single load step while table 1 gives the algorithm of the
incremental-iterative procedure.
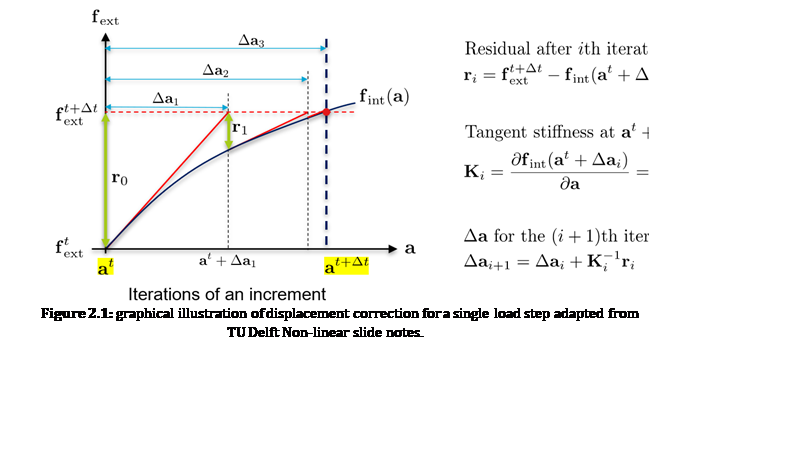
Table 1: Computational flow in a non-linear
finite element code adapted from De Brost et al.2012

3.
NUMERICAL EXAMPLE OF A
STEEL BEAM SUBJECTED TO LOW-SPEED IMPACT LOAD
A
numerical simulation of a 30m long steel beam (UB ![]() with a thickness of
with a thickness of![]() ) subject to high-speed impact based on
the non-linear theoretical framework discussed above was carried out to
investigate the deformation and rotation capacity of the steel beam under the
impact.
) subject to high-speed impact based on
the non-linear theoretical framework discussed above was carried out to
investigate the deformation and rotation capacity of the steel beam under the
impact.
For
this finite element (F.E) simulation, the full Newton-Raphson method was used.
The material parameters are as follows:
For
steel:
· Young’s Modulus of elasticity; ![]()
![]()
·
Poisson
ratio 0.3
· Yield stress ![]()
·
Density 8E-9
For
rigid impactor:
·
Young’s
Modulus of elasticity; ![]()
·
Poisson
ratio 0.2
· Density ![]()
The
displacement history time graph represents the true characteristic nature of
dynamic behaviour for a high frequency (33![]() ) loading where the unloading
cycle appears to be less than I/10000th of a second. This unloading
time suggests that the impact load is quite severe as the release of
instantaneous energy can be assumed from the sharp rise in deformation of the
beam of almost
) loading where the unloading
cycle appears to be less than I/10000th of a second. This unloading
time suggests that the impact load is quite severe as the release of
instantaneous energy can be assumed from the sharp rise in deformation of the
beam of almost![]() . This deformation encompasses the
initial vertical downward displacement, the rebound of the beam in the opposite
direction (see fig. 4.2) as well as subsequent twisting of the beam.
. This deformation encompasses the
initial vertical downward displacement, the rebound of the beam in the opposite
direction (see fig. 4.2) as well as subsequent twisting of the beam.

Figure 3: Time history graph

Figure 4: Deformation after initial drop

Figure 4.1: Deformation after
initial drop

Figure 4.2: Rebound displacement
4. NUMERICAL SIMULATION
After the
initial displacement as shown in fig.4 and fig. 4.1 above and the rebound
displacement of the beam as shown in fig. 4.2, the beam continued to vibrate.
The amplitude of the vibration reduced to zero in less than a second as can be
seen from fig. 3. This suggests that the structure is overdamped as the
displacement had decayed rather exponentially. The vibration of the structure
after impact is as shown in figs. 5 to 7. From the frequency (33![]() ) and speed of loading as shown in
fig. 3, it shows that the beam is able to respond in a rather ductile manner to
the impact loading of a
) and speed of loading as shown in
fig. 3, it shows that the beam is able to respond in a rather ductile manner to
the impact loading of a ![]() rigid impactor dropped from a height of
rigid impactor dropped from a height of ![]() However, from the deformed shape of the beam
element after the impact load, it is considered to have failed as its structural
integrity is lost due to excessive twisting of the beam.
However, from the deformed shape of the beam
element after the impact load, it is considered to have failed as its structural
integrity is lost due to excessive twisting of the beam.
Similarly,
from the initial drop as shown in fig. 2.1, the beam rotated by ![]() and for the rebound displacement the rotation
was
and for the rebound displacement the rotation
was ![]() which is clearly over the maximum limit to
avoid any secondary hazard. Furthermore, the rotation at first mode was
which is clearly over the maximum limit to
avoid any secondary hazard. Furthermore, the rotation at first mode was ![]() which is clearly above the maximum rotation
value of
which is clearly above the maximum rotation
value of ![]() for steel structures to prevent collapse.
Implying that the beam has failed.
for steel structures to prevent collapse.
Implying that the beam has failed.

Figure 4.3: Mode shape 1 rotation

Figure 6: Mode shape 2

Figure 7: Mode shape 3
4.1. ANALYTICAL COMPARISM
From the
above numerical simulations, the ![]() rigid impactor was only in contact with
the beam for a short period of time followed by a rebound of the beam due to
action of elastic interface restoring force (Aliyu 2019). This according to
Stronge (2018) can be classified as an elastic impact. Also form the Newtons
experimental law of impact, the coefficient of restitution for an elastic
impact is assumed to be 1 (Stronge, 2018). Hence, the kinetic energy for the
above elastic impact with a coefficient of restitution 1, according to Mughal
and Smith cited in Aliyu (2019), is evaluated using the following expression
rigid impactor was only in contact with
the beam for a short period of time followed by a rebound of the beam due to
action of elastic interface restoring force (Aliyu 2019). This according to
Stronge (2018) can be classified as an elastic impact. Also form the Newtons
experimental law of impact, the coefficient of restitution for an elastic
impact is assumed to be 1 (Stronge, 2018). Hence, the kinetic energy for the
above elastic impact with a coefficient of restitution 1, according to Mughal
and Smith cited in Aliyu (2019), is evaluated using the following expression
![]()
While
the maximum vertical downward displacement ![]() as
well as the available strain energy
as
well as the available strain energy ![]() was evaluated using the following expressions
was evaluated using the following expressions
![]()
![]()
The
maximum allowable vertical downward displacement was equally evaluated using
the following expression
![]()
From
the above expressions, the maximum vertical downward deflection as well as the
allowable maximum vertical downward deflection were both found to be![]() . This closely matched the initial
vertical downward displacement from the Abaqus simulations which was found to
be
. This closely matched the initial
vertical downward displacement from the Abaqus simulations which was found to
be ![]() (see fig. 4)
(see fig. 4)
5.
CONCLUSION
In
a pursuit to analyse non-linear dynamic problems the framework for the
displacement based finite element method was introduced where material and
geometric non-linearity had been considered. Similarly, the incremental
analysis procedure for non-linear problems have been discussed. The accuracy of
the results of deformation obtained from this non-linear finite element
analysis was compared to those obtained from the analytical technique using the
energy momentum balance technique as presented by Mughal and Smith cited in
Aliyu (2019) which gave a maximum vertical downward deflection of ![]() after initial impact. This was found to
agree with the Abaqus vertical downward deflection of
after initial impact. This was found to
agree with the Abaqus vertical downward deflection of ![]() after initial impact. Although, the deflection
appeared to be within the acceptable limits, the beam was considered to have
failed as the rotation limits for safe design had been exceeded. It has turned
out that this displacement-based method of non-linear finite element analysis
as well as the energy momentum balance technique presented in (Aliyu, 2019) are
viable for use practically as it is able to predict with
after initial impact. Although, the deflection
appeared to be within the acceptable limits, the beam was considered to have
failed as the rotation limits for safe design had been exceeded. It has turned
out that this displacement-based method of non-linear finite element analysis
as well as the energy momentum balance technique presented in (Aliyu, 2019) are
viable for use practically as it is able to predict with ![]() accuracy the behaviour of structures subject
to impact load (which is a non-linear dynamic problems) at a very reasonable
cost.
accuracy the behaviour of structures subject
to impact load (which is a non-linear dynamic problems) at a very reasonable
cost.
SOURCES OF FUNDING
This research received no specific grant from any funding agency in the public, commercial, or not-for-profit sectors.
CONFLICT OF INTEREST
The author have declared that no competing interests exist.
ACKNOWLEDGMENT
None.
REFERENCES
[1] Aliyu, OH. Design Recommendations for Steel Beams to
Prevent Brittle Fracture. Nigerian
Journal of Technologycal Development, 16 (2), 2019, 78-84.
[2] Aliyu, OH. A Review on Mechnics of
Impacts on Steel Plates. Journal of Engieering
Research, Special Edition, 24(1), 2019, 11-28
[3] Belytschko, T., Liu, WK., Moran,
B., Elkhoday, K I. Nonlinear Finite
Element for Continuua and Structures. Second Edition ed. West Sussex United Kingdom: John Wiely and Sons. 2014.
[4] Stein, E. Progress in
Computational Analysis of Inelastic Structures. New York. Springer 1993.
[5] Laursen, AT. Computational Contact
and Impact Mechanics 2nd Edition. Springer U.S.A, 2003.
[6] De Borst, R., Crisfileld, MAR.,
Remmers, JJC., & Verhrosel, CV. Non-linear Finite Element Analysis of Solid
and Structures 2nd Edition. Johon Wiley
and Sons Ltd. United Kingdom, 2012.
[7] Mughal, MA, Smith, SJ. Design
Guide for Structures Subject to Impulse and Impactive Loads. PPG Report No.
SXB-IC-096565; NDA Report No. PWR/92/161 Bechtel Guide No. C-2.45 1994.
[8] Stronge, WJ. Impact Mechanics
First ed. Cambridge United: Cambridge University Press. 2018.
[9] Seshu, P. Finite Element Analysis. PHI Learning Private
Limited New Delhi, 2012.
[10]
Wang, T., Hsu, TTC. Nonlinear finite element
analysis of concrete structures using new consitiutive models. Computer and
Structures 79, 2001, 2781-2791.
[11]
Ayoub,
A. & Filippou, FC. Nonlinear Finite Element Analysis of R.C. Shear Panels
and Walls. Journal of Structural Engineering, 124, 1998, 298-308.
[12]
Kim,
N. Introduction to Nonlinear Finite Element Analysis. Springer New York, 2018.
[13]
Hartmann, S. A remark on te application of the
Newton-Raphson method in non-linear finite element analysis. Computer
Mechanics. 36, 2005, 100-116.
[14]
Tsavadaris,
KD. & Mello, CD. Vierendeel Bending Study of Perforated Steel Beams with
Various Novel Web Opening Shapes Through Non-linear Finite Element Analysis.
Journal of Structural Engineering, 138 (10), 2012, 1214-1230.
[15]
Barth,
B K. & Wu, H. Efficient nonlinear
finite element modelling of slab on steel stringer bridges. Elsevier, 2006,
1304-1313.
|
|
 This work is licensed under a: Creative Commons Attribution 4.0 International License
This work is licensed under a: Creative Commons Attribution 4.0 International License
© IJETMR 2014-2020. All Rights Reserved.